产品中心
 查看IECUBE所有自研产品 >
查看IECUBE所有自研产品 >
 查看NI所有产品 >
查看NI所有产品 >
查看IECUBE所有自研产品 >
- 集成电路
- IECUBE-3835数智化半导体参数实测分析平台 IECUBE-3839集成电路研发及量产测试通用平台 IECUBE-3830集成电路工艺制造VR实训平台 IECUBE-3100集成电路测试实训平台
- 机电控制&自动化
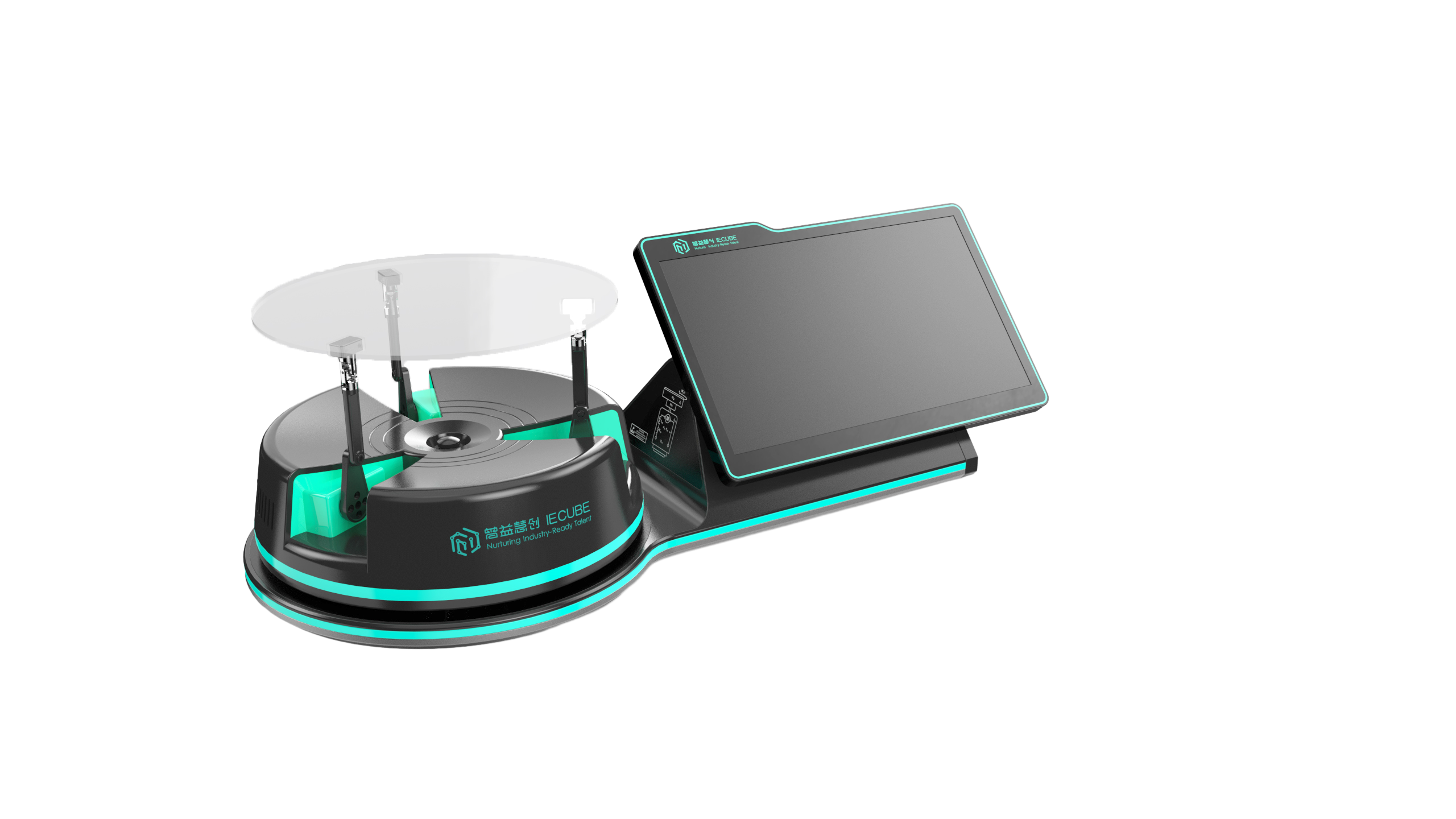
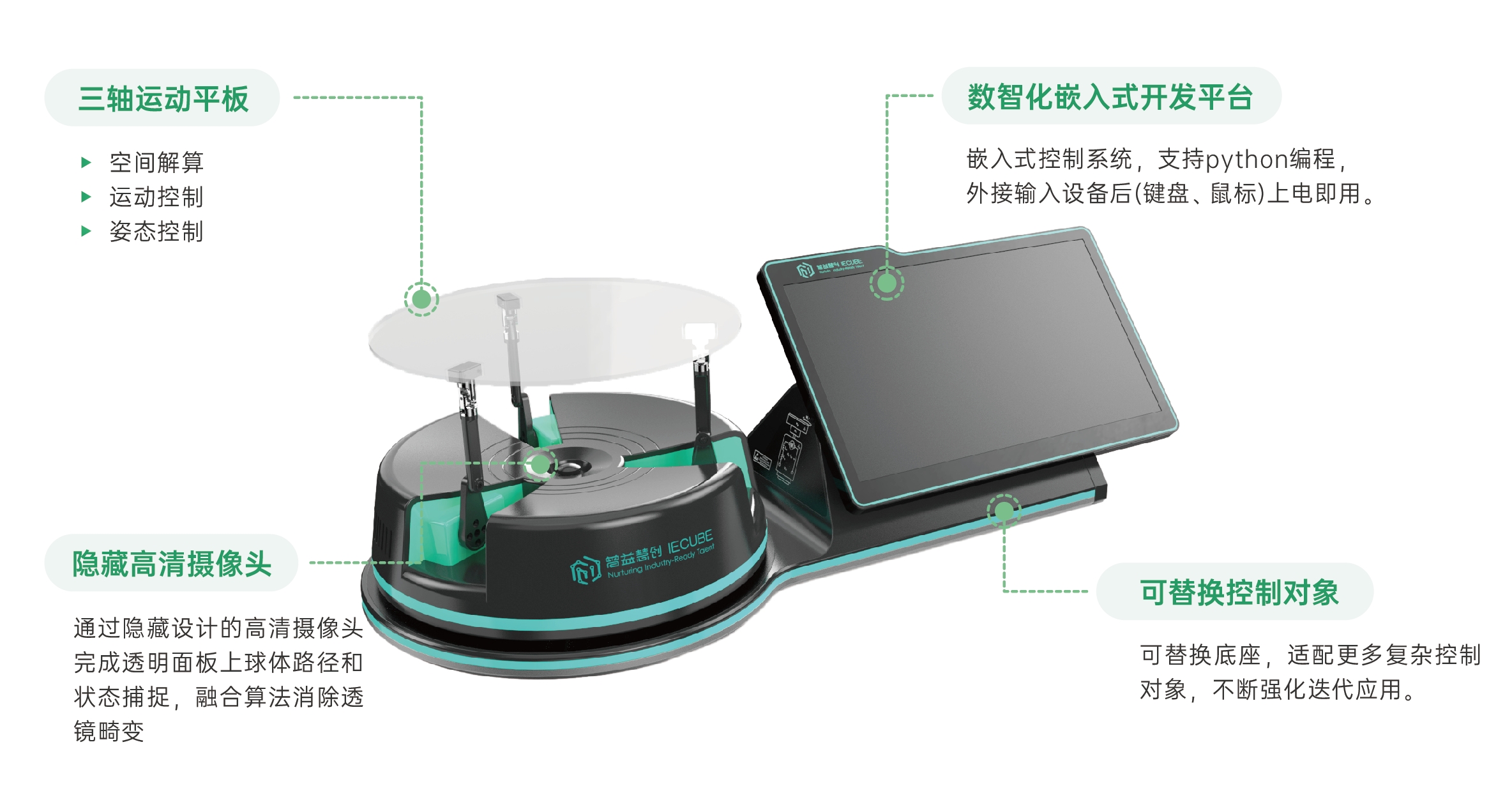
- IECUBE-2830M 直流电机智能控制系统实验平台 IECUBE-2830MP直流电机与倒立摆智能控制系统实验平台 IECUBE-2830L “多对象all in one”的控制系统实验平台 IECUBE-2831S双轴智能板球系统 IECUBE-2831C数智化三轴智能板球系统 IECUBE-2835多模态轮足机器人开发平台 IECUBE-2840 斯图尔特智能动力座舱
 查看NI所有产品 >
查看NI所有产品 >
- 基于CRIO平台设备
- CompactRIO分布式测量与控制设备
- 免费交互式测试软件
- NI Nigel™ AI FlexLogger数据采集软件 InstrumentStudio™软件